Stop identification with ST-DBSCAN
Source:vignettes/stop-identification.Rmd
stop-identification.RmdPresentation
This vignette briefly demonstrates how to perform stop identification in a GPS track using ST-DBSCAN, which is a classic application of this algorithm.
Dataset
The GeoLife GPS Trajectories dataset is used for this demonstration. The GPS trajectories are located in Beijing. We previously converted the pings to a metric coordinate reference system (EPSG:4586) and selected only the relevant variables.
head(geolife_traj)
#> date time x y
#> 1 2008-10-23 02:53:04 441782.8 4428131
#> 2 2008-10-23 02:53:10 441785.6 4428129
#> 3 2008-10-23 02:53:15 441782.8 4428129
#> 4 2008-10-23 02:53:20 441780.1 4428130
#> 5 2008-10-23 02:53:25 441769.6 4428126
#> 6 2008-10-23 02:53:30 441749.3 4428121
ggplot() +
geom_path(data = geolife_traj, aes(x, y)) +
labs(x = "", y = "",
title = "GPS track analyzed in this vignette",
caption = "Data: GeoLife GPS Trajectories (Microsoft, 2012). Author: Antoine Le Doeuff, 2026",
) +
coord_equal() +
theme_minimal() +
theme(plot.title = element_text(size = 16, face = "bold"))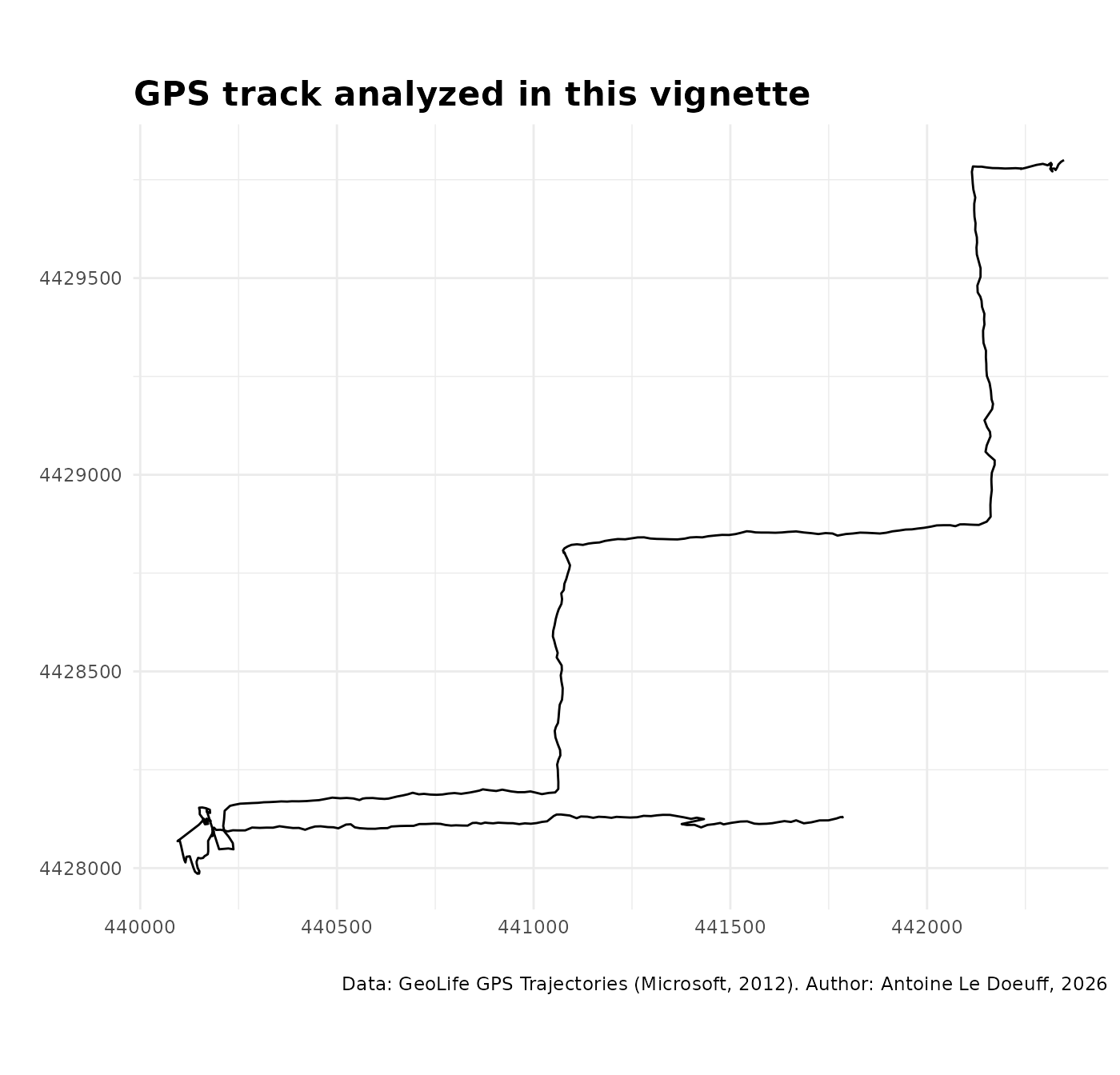
Preprocessing
For st_dbscan() to work, the time variable must be
numeric. We therefore convert it to seconds since the beginning of the
track. Note that the data must be sorted by time.
geolife_traj$date_time <- as.POSIXct(
paste(geolife_traj$date, geolife_traj$time),
format = "%Y-%m-%d %H:%M:%S",
tz = "GMT"
)
# Sort data by time if needed
geolife_traj <- geolife_traj[order(geolife_traj$date_time), ]
# Convert to cumulative time
geolife_traj$t <- as.numeric(
geolife_traj$date_time - min(geolife_traj$date_time)
)
# Convert to matrix
data <- cbind(geolife_traj$x, geolife_traj$y, geolife_traj$t)Run ST-DBSCAN
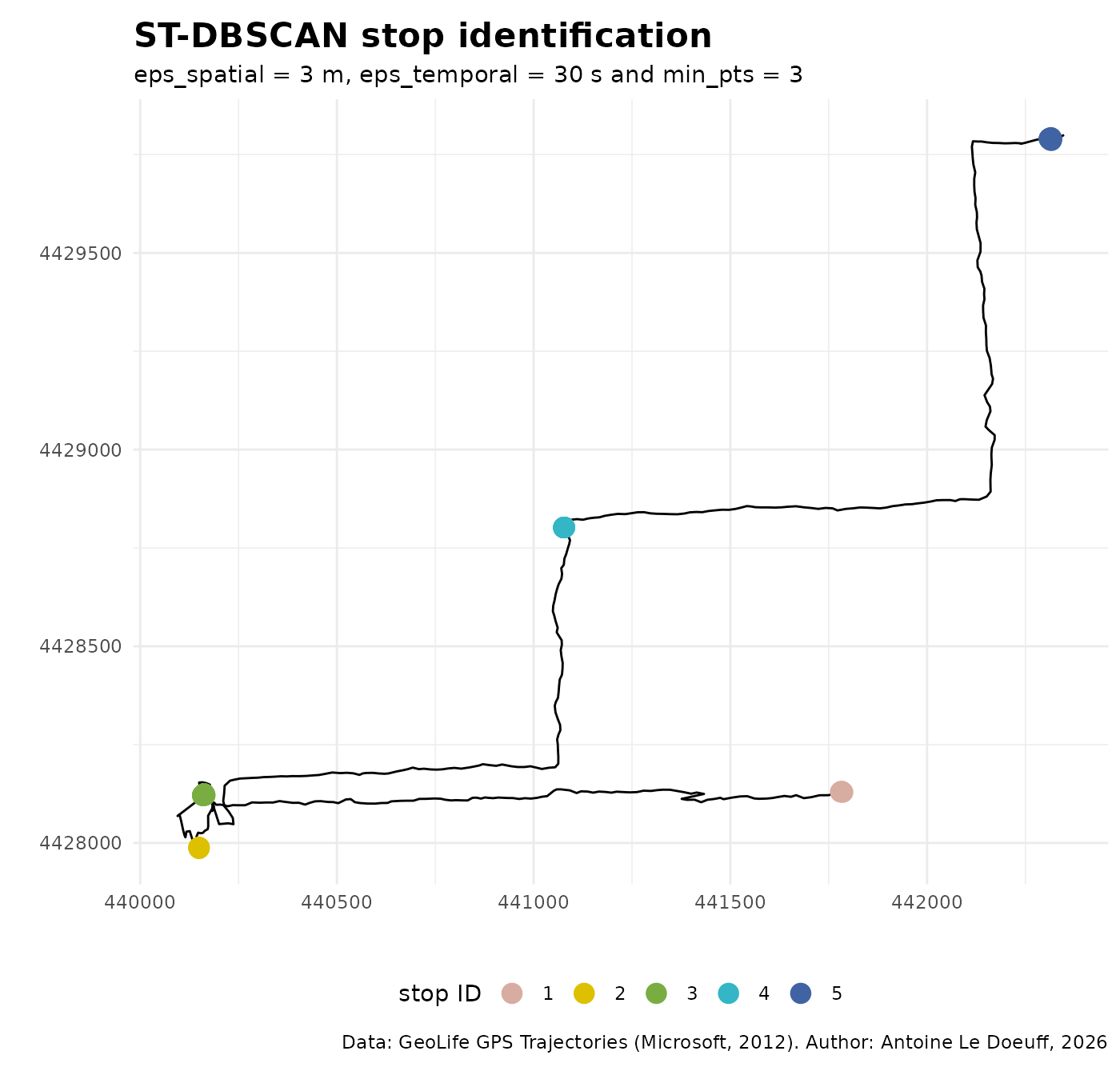
We can then run ST-DBSCAN using st_dbscan(). We set a
spatial neighborhood of 3 meters, a temporal neighborhood of 30 seconds,
and require a minimum of 3 pings to form a cluster. Note that these
parameters are used only for demonstration purposes; in practice, a grid
search (or similar tuning strategy) should be used to determine optimal
values. You can also pass extra arguments that you would use with
dbscan::dbscan() and dbscan::frNN().
(res <- st_dbscan(
data = data,
eps_spatial = 3, # meters
eps_temporal = 30, # seconds
min_pts = 3,
# extra arguments
splitRule = "STD",
search = "kdtree",
approx = 1
))
#> ST-DBSCAN clustering for 468 objects.
#> Parameters: eps = 3, eps_temporal = 30, minPts = 3
#> Using euclidean distances and borderpoints = TRUE
#> The clustering contains 5 cluster(s) and 420 noise points.
#>
#> 0 1 2 3 4 5
#> 420 4 5 12 12 15
#>
#> Available fields: cluster, eps, minPts, metric, borderPoints,
#> eps_temporalAs with dbscan::dbscan(), the number of points in each
cluster is displayed when the result is printed.
Check result
Clusters can be plotted directly using ggplot2:
# Put the cluster in the input data
geolife_traj$clust <- as.factor(res$cluster)
# Extract stops and movements
geolife_traj_mvt <- geolife_traj[geolife_traj$clust == "0", ]
geolife_traj_stop <- geolife_traj[geolife_traj$clust != "0", ]
# Plot
ggplot() +
geom_path(data = geolife_traj_mvt, aes(x, y)) +
geom_point(data = geolife_traj_stop, aes(x, y, color = clust), size = 4) +
labs(x = "", y = "", color = "stop ID",
title = "ST-DBSCAN stop identification",
subtitle = "eps_spatial = 3 m, eps_temporal = 30 s and min_pts = 3",
caption = "Data: GeoLife GPS Trajectories (Microsoft, 2012). Author: Antoine Le Doeuff, 2026",
) +
scale_color_manual(values = MetBrewer::met.brewer("Isfahan2", 5)) +
coord_equal() +
theme_minimal() +
theme(
legend.position = "bottom",
plot.title = element_text(size = 16, face = "bold"),
)
Clusters can be visualized in 3D using plotly:
# Zoom on stop 4
geolife_traj_f <- geolife_traj[
geolife_traj$x > 441060 & geolife_traj$x < 441100,
]
geolife_traj_f <- geolife_traj_f[
geolife_traj_f$y > 4428780 & geolife_traj_f$y < 4428820,
]
# Extract stop
geolife_traj_f_stop <- geolife_traj_f[geolife_traj_f$clust != "0", ]
# Plotly figure
fig <- plot_ly(
data = geolife_traj_f,
x = ~x,
y = ~y,
z = ~t,
type = "scatter3d", mode = "lines+markers",
line = list(wigeolife_trajh = 4, color = "grey"),
marker = list(size = 3, color = "grey")
)
fig |>
add_markers(
x = ~geolife_traj_f_stop$x,
y = ~geolife_traj_f_stop$y,
z = ~geolife_traj_f_stop$t,
marker = list(size = 4, color = 'red'),
name = 'Stop'
) |>
layout(
scene = list(
xaxis = list(title = "x"),
yaxis = list(title = "y"),
zaxis = list(title = "t")
)
)